已收录至https://zhuanlan.zhihu.com/p/52815498
本文内容来自官方教程
可以直接跳到6看
0 例
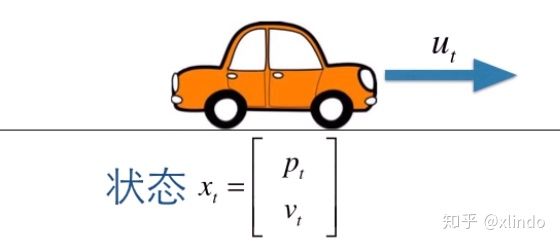
可以列出模型
$$\begin{cases} p_t = p_{t-1}+ v_{t-1} \times \Delta t+u_t\times\frac{\Delta t^2}{2} \ v_t=v_{t-1}+u_t\times\Delta t\end{cases} $$
则可以写出状态空间方程
$$\left[\begin{matrix}p_t \ v_t\end{matrix}\right]=\left[\begin{matrix}1 & \Delta t \ 0 & 1\end{matrix}\right]\left[\begin{matrix}p_{t-1} \ v_{t-1}\end{matrix}\right]+\left[\begin{matrix}\frac{\Delta t^2}{2} \ \Delta t\end{matrix}\right]u_t $$