科技:卡尔曼滤波器
已收录至https://zhuanlan.zhihu.com/p/52815498
本文内容来自官方教程
可以直接跳到6看
0 例
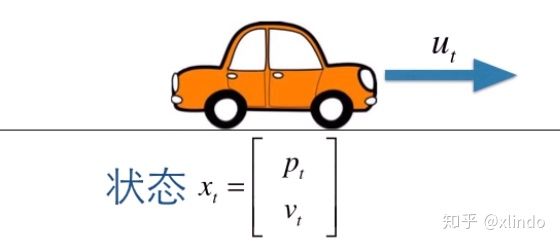
可以列出模型
$$\begin{cases} p_t = p_{t-1}+ v_{t-1} \times \Delta t+u_t\times\frac{\Delta t^2}{2} \ v_t=v_{t-1}+u_t\times\Delta t\end{cases} $$
则可以写出状态空间方程
$$\left[\begin{matrix}p_t \ v_t\end{matrix}\right]=\left[\begin{matrix}1 & \Delta t \ 0 & 1\end{matrix}\right]\left[\begin{matrix}p_{t-1} \ v_{t-1}\end{matrix}\right]+\left[\begin{matrix}\frac{\Delta t^2}{2} \ \Delta t\end{matrix}\right]u_t $$
1 状态预测公式
令
$$F_t=\left[\begin{matrix}1 & \Delta t \ 0 & 1\end{matrix}\right],B_t=\left[\begin{matrix}\frac{\Delta t^2}{2} \ \Delta t\end{matrix}\right], $$
即得出第一个卡尔曼滤波器公式,状态预测公式
$$\displaystyle \hat{x}t^- = F_t\hat{x}{t-1}+B_tu_t \ $$
其中$F_t$状态转移矩阵:从上一时刻推测这一时刻;
$B_t$为控制矩阵:控制量$u$如何作用;
$\hat{x}_t$为估计值;
$\hat{x}_t^-$为未修正的估计值。
2 不同时刻的不确定性的传递关系公式
协方差矩阵
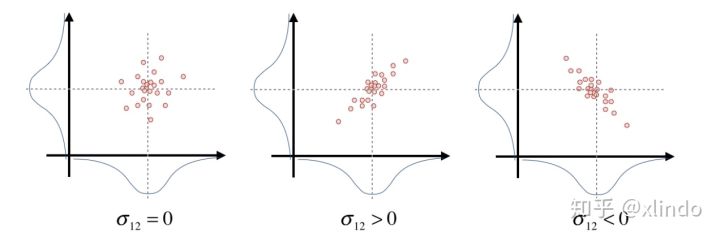
$$
\displaystyle cov(x,x)=\left[\begin{matrix}\sigma_{11} & \sigma_{12} \\sigma_{12} & \sigma_{22}\end{matrix}\right] \ $$
该例中每一个时刻的不确定性都由协方差矩阵$P$来表示,而不确定性的不同时刻传递为 $$\displaystyle P_t^- = FP_{t-1}^-F^T \$$
再加上预测模型本身的状态转移噪声协方差矩阵 Q ,得到第二个公式,不确定性的传递关系
$$\displaystyle P_t^- = FP_{t-1}^-F^T +Q\ $$
3 状态观测
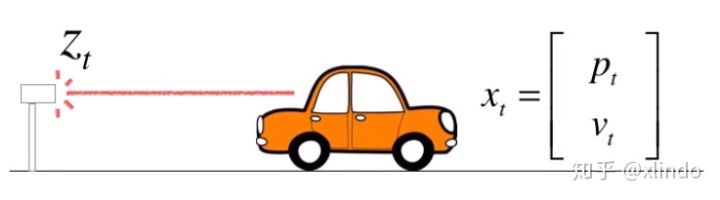
有测量值$z_t$,为一维向量,并加上噪声$v$ ,观测噪声的协方差矩阵为$R$,本例为$R^1$
$$\displaystyle H=[\begin{matrix}1&0\end{matrix}] \ z_t = Hx_t+v\ $$
4 状态更新
实际观测值与预期观测值的残差乘以$K$作修正
$$\displaystyle \hat{x}_t = \hat{x}_t^-+K_t(z_t-H \hat{x}_t^-)\ $$
其中$K$为卡尔曼系数,
$$\displaystyle K_t = P_t^-H^T(HP_t^-H^T+R)^{-1}\$$
其作用为
- 权衡预测协方差$P$和观察两协方差$R$:
- 若相信预测多一点,则残差权重小一点;
- 若相信观察多一点,则残差权重大一点。
- 把残差的形式从观察域转换到状态域:$z$为一维向量,而$x$为二维向量,即可以在两个维度同时修正。
5 噪声协方差矩阵的更新
更新最佳估计值的噪声分布 $$\displaystyle P_t = (I-K_tH)P_t^-\ $$
在不确定性的变化中找一种平衡。
6 5个公式
预测:
$$\displaystyle \hat{x}t^- = F_t\hat{x}{t-1}+B_tu_t \P_t^- = FP_{t-1}^-F^T +Q\ $$
更新:
$$\displaystyle \begin{aligned} K_t& = P_t^-H^T(HP_t^-H^T+R)^{-1}\\hat{x}_t& = \hat{x}_t^-+K_t(z_t-H \hat{x}_t^-)\ P_t& = (I-K_tH)P_t^- \end{aligned}\ $$
$x_t$ : t 时刻的状态
^: 观测值
$^-$: 未修正值
$F_t$ : 状态转移矩阵,和具体的线性系统相关
$u_t$ : K时刻外界对系统的作用
$B$ : 输入控制矩阵,外界的影响如何转化为对状态的影响
$P$ : 误差矩阵
$Q$ : 预测噪声协方差矩阵
$R$ : 测量噪声协方差矩阵
$H$ : 观测矩阵
$K_t$ : t 时刻的kalman增益
$z_t$ : t 时刻的观测值
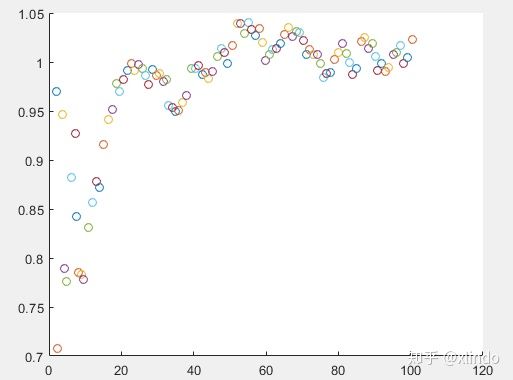
7 Matlab实例
1 | Z=(1:100); %观测值 |
结果如下,